OpenCV 图像处理基本操作
基于Mat类的图像操作
- Mat类分为两个数据部分:数据头部分(保存矩阵大小、矩阵存储方式等信息)、矩阵数据部分, 一般的Mat对象复制构造仅拷贝数据头部分,矩阵数据部分共享。也可以通过
cv::Mat::copyTo和cv::Mat::clone进行深度拷贝。 - Mat构造函数
Mat img(2, 2, CV_8UC3, Scalar(0, 0, 255)), 需要明确矩阵大小、矩阵存储数据类型、像素颜色通道数、像素值。 - CV_8UC3含义表示8位无符号数据,颜色通道为3,含义参考:
CV_[The number of bits per item][Signed or Unsigned][Type Prefix]C[The channel number] - 几种特殊矩阵的构造,
cv::Mat::eyes单位矩阵、cv::Mat::zeros零矩阵、cv::Mat::ones全1矩阵
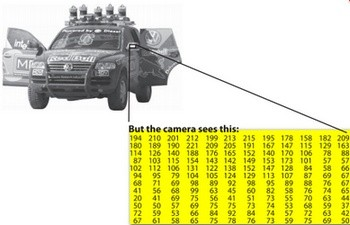
图像卷积操作
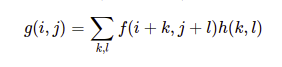
根据kernel矩阵重新计算图像中每个像素的值,h(k, j) 为kernel,使用
filter2D进行卷积操作
1
2
3
4
5
6
7CV_EXPORTS_W void filter2D( InputArray src,
OutputArray dst,
int ddepth,
InputArray kernel,
Point anchor = Point(-1,-1),
double delta = 0,
int borderType = BORDER_DEFAULT );使用图像卷积进行图像模糊(平滑)
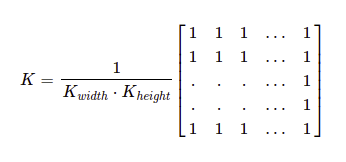
- 简单的图像平滑,Kernel模型如下
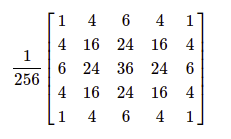
- 高斯模糊,根据距当前像素点的距离决定平滑的权重,一维高斯核的图像如下
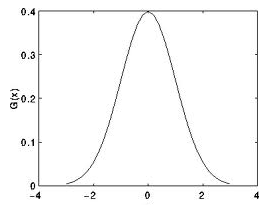
二维高斯公式,其中μ为平均值,σ为方差
- 中值滤波,将像素点周围区域内的像素进行排序,采用中间位置的像素值作为当前像素点的值
- 双边滤波,权重由两部分来决定,第一部分是类似于二维高斯,另一部分由颜色差异来决定,这样可以比较好的保留边缘信息。
- 简单的图像平滑,Kernel模型如下
图像边界处理,使用
copyMakeBorder给图像创建一个边框BORDER_CONTANT,使用固定像素值填充创建的边框BORDER_REPLICATE,复制原图像中的边界值
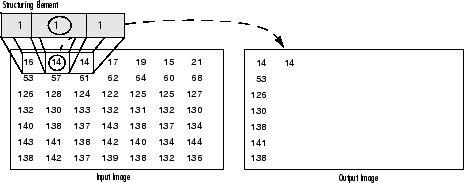
使用图像卷积进行形态学操作,主要针对阈值化后的图像
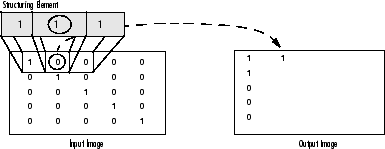
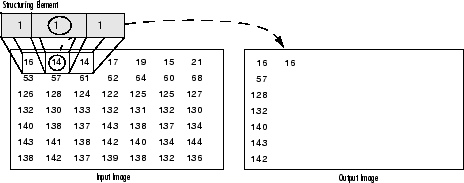
- 膨胀 Dilate,使用Kernel范围内的最大值取代当前像素值
膨胀二值化图像
膨胀灰度图像
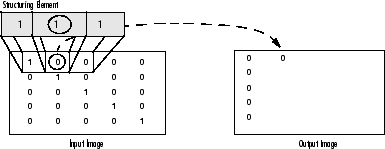
- 腐蚀 Erode,使用Kernel范围内的最小值取代当前像素值
腐蚀二值化图像
腐蚀灰度图像
- 开操作 Opening,先腐蚀后膨胀,去除暗黑背景中细小的噪点,原理 *dst = open(src, element) = dilate(erode(src, element))*, element为kernel
- 闭操作 Closing,先膨胀后腐蚀,去除明亮背景中的细小噪点,原理 dst = close(src, element) = erode(dilate(src, element))
- 形态梯度 Morphological Gradient,膨胀图像与腐蚀图像的差,用来找出物体轮廓,原理 dst = morphy(src, element) = dilate(src, element) - erode(src, element)
- 高帽 Top Hat
- 膨胀 Dilate,使用Kernel范围内的最大值取代当前像素值
也可以使用 getStructuringElement 创造指定形状和大小的Kernel,进行图像的特征提取,如官方教程提取乐谱中的直线和音符,就是借助形态学开操作进行直线和音符的提取。
图像融合
- 图像融合公式
dst = src1*alpha + src2*beta + gamma,使用addWeighted()进行融合。1
2
3
4
5
6
7void cv::addWeighted( InputArray src1,
double alpha,
InputArray src2,
double beta,
double gamma,
OutputArray dst,
int dtype = -1 );
改变图像对比度和亮度
- 公式
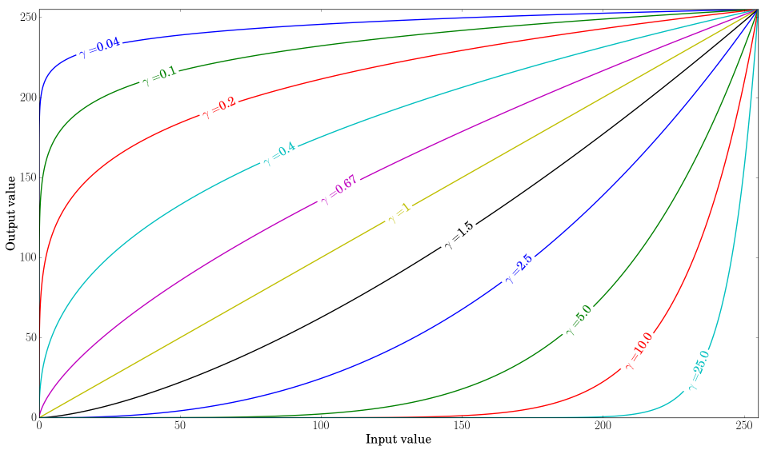
g(x)=αf(x)+β改变α的值可以改变图像的对比度,改变β的值可以改变图像的亮度 - Gamma校准,使用查找表,按照如下公式对像素值进行一个非线性的转换 O = (I / 255)^γ × 255,γ越大整体亮度降低。
图像的缩放
- 高斯金字塔(Gaussian Pyramid),从底部开始计数,第 i+1 层表示为 G(i + 1)
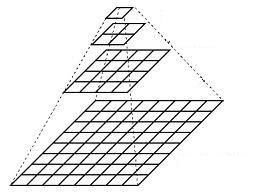
- *G(i + 1)层的变换过程,由G(i)*层先进行高斯模糊,然后丢掉偶数行和偶数列的像素,即图像缩小的操作
- 图像放大的操作,图像放大两倍,在奇数行和奇数列填充0像素,再进行高斯模糊
图像阈值操作threshold的几种方法
- 二值化(Threshold Binary),
src(x, y)大于阈值threshold则置为最大值,否则置为0 - 反向二值化(Threshold Binary, Inverted),
src(x, y)小于阈值threshold则置为最大值,否则置为0 - 截取像素值(Truncate),
src(x, y)大于阈值threshold则令src(x, y)等于threshold,否则不变 - 只保留超过阈值部分,
src(x, y)大于阈值threshold则置为原值,否则置为0 - 只保留小于阈值部分,
src(x, y)小于阈值threshold则置为0,否则不变
图像像素梯度计算
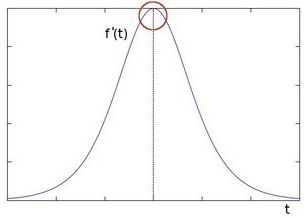
Sobel边缘检测算子,利用图像边缘像素强度值变化非常显著的特点,使用特殊的卷积核计算水平方向的梯度变化和竖直方向的梯度变化。如下图是图像边缘像素强度的变化曲线的一维图像和该图像像素强度变化梯度图像(即导数图像),像素强度变化最剧烈的地方就可能是物体边缘。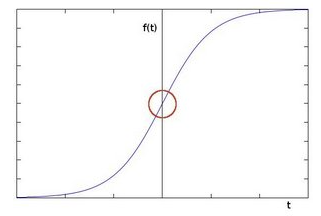
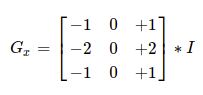
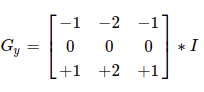
利用特殊的卷积核计算水平梯度变化和垂直梯度变化,然后再融合两个梯度图像
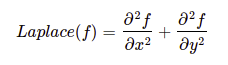
利用二级导数,像素强度变化剧烈的点即一阶导数极值点,其二级导数值接近0,拉普拉斯算子
Laplacian计算水平方向和竖直方向上二级导数的和,OpenCV提供的Laplacian()函数,内部也是通过调用Sobel()来计算的,如下图二级导数图像和拉普拉斯公式。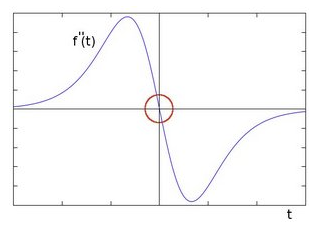
Canny边缘检测,1986年由John F. Canny提出,被认为是最优的边缘检测算法,其具有三个主要的特点:较低的错误率、较好的边缘定位、较快的检测速度,其检测步骤如下:- 使用高斯平滑模糊图像
- 计算图像亮度梯度图像,其过程与Sobel算子类似,分别计算x y方向上的梯度,再进行融合
- 去掉不是很连续的像素点,认为其不属于边缘
- 使用两个阈值,一大一小,其比例一般为2:1或者3:1,高于upper阈值认为其为边缘,低于lower阈值丢弃该像素点,介于upper与lower之间的像素点则看邻接像素点是否高于upper,是的话接受其为边缘
霍夫变换直线检测
- 图像转化为灰度颜色,首先进行高斯模糊
- 再进行边缘检测,使其变成了一个二值化包含边缘的图像
- 经过该图像上像素点(x0, y0)的所有直线的方程可以表述为如下,霍夫变换检测每一个像素点的经过直线的条数,经过的直线条数到达一定阈值后可认为该